Miniature Walking Dragline
|
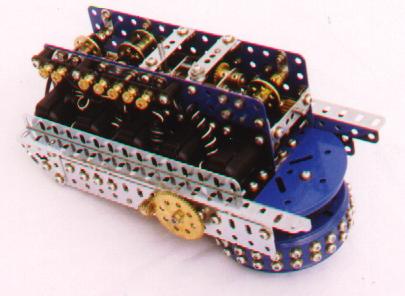
Side view of the model in its current state of construction. There
are five electric motors. The front one drives a winding drum for pulling the bucket
in. The second one operates the slewing mechanism for rotating the base. The
third one drives the walking mechanism. The fourth and fifth both drive winding
drums for the jib hoist and bucket lift respectively. |
Changes in my life style have dictated that I have to
stop building "titan" models and miniaturise things so that they can fit into a
suitcase. Hence the inspiration for building this model.

|
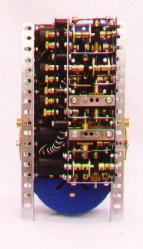
At left a view of the base of the model. The base is made from a
pair of 95mm diameter Märklin "wheels". After experimenting with MW part
143a I settled on the Märklin parts as being closest to scale. Several non
conventional gear ratios had to be used in the tight space. |
|
This top view shows the extremely tight gear boxes that are needed for
each motor. There are five independent 1.5" x 2" gear boxes packed into
the model. Four of the motors have a common earth. The drive for the walking
mechanism requires a separate switching mechanism. |
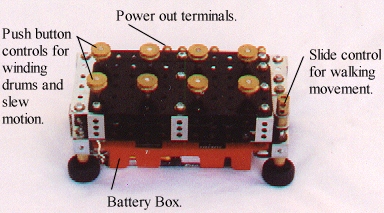
Below I have added a photograph of the control or
switching mechanism for the model.
|
The controls for the three winding drums and the
slew motion are push button contacts. They are spring loaded to allow instant power
cut off at the desired moment. I modified a design from the September 1966 Meccano
Magazine by using part 147d instead of part 543. I also used the modern rubber
pulley part 23c as a spring to ensure even contact. Walking is a relatively slow
activity, hence the positive on/off slide switch. |
Photographs of the boom and the superstructure of the
model will be added once they are completed.
 Part 27b
Part 27b