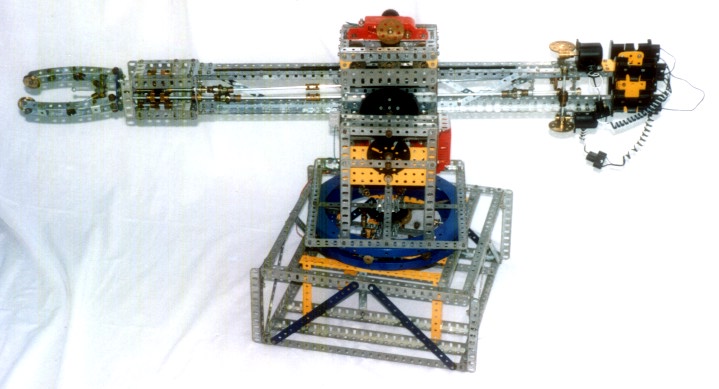
This model is one of my own creations. It is a robotic arm with five degrees of freedom (being rotation, tilting, extension, wrist rotation and grasping). Each action is powered by its own motor. In total there are two black M0 MkII (wrist and hand actions), two red MR motors (tilt and extend) and one non-Meccano side plate motor (waist rotation).
First up a view of the whole arm.
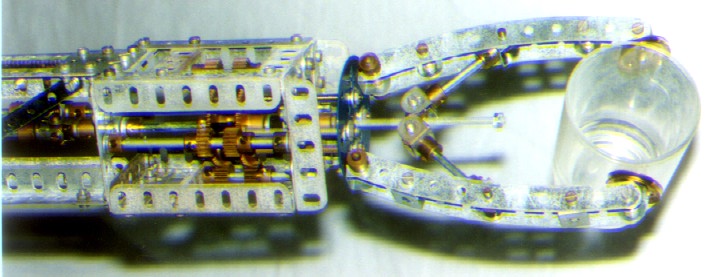
Now a view of the wrist and hand section.
Now the motor assembly at the back end of the arm. This section helps counter balance the main beam as well as holding the wrist and hand motors.
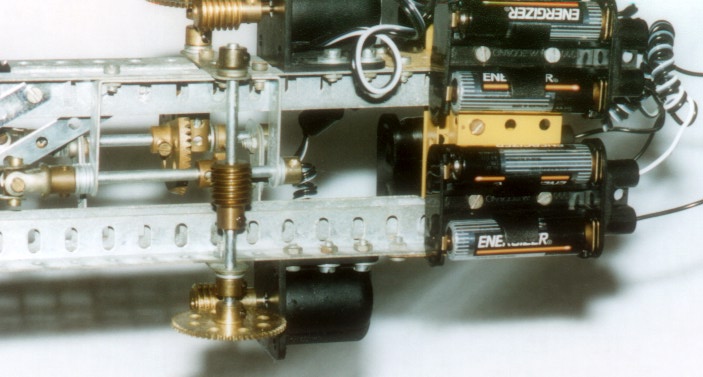
Here is a view of the drive that provides the extension. The gears drive a succession of rack strips that are mounted along the top of the arm beam. Underneath the beam runs on eight small flanged wheels.
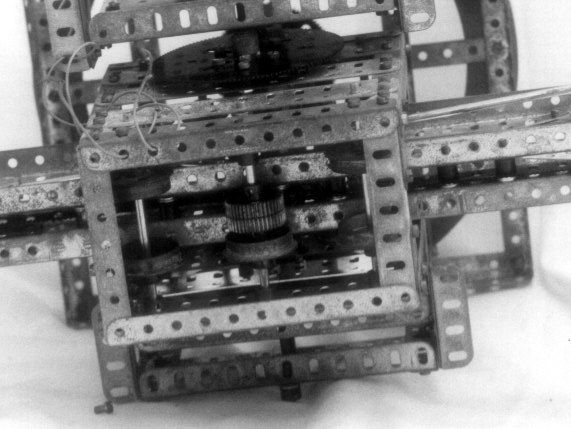
The final picture here is of the drive to the tilting mechanism. Most of the gearing is replicated on the back side of the arm.

I've got other pictures which I am unlikely to scan in simply because they little extra information about the contruction of the model.